Deeper and Wider Siamese Networks for Real-Time Visual Tracking
[toc]
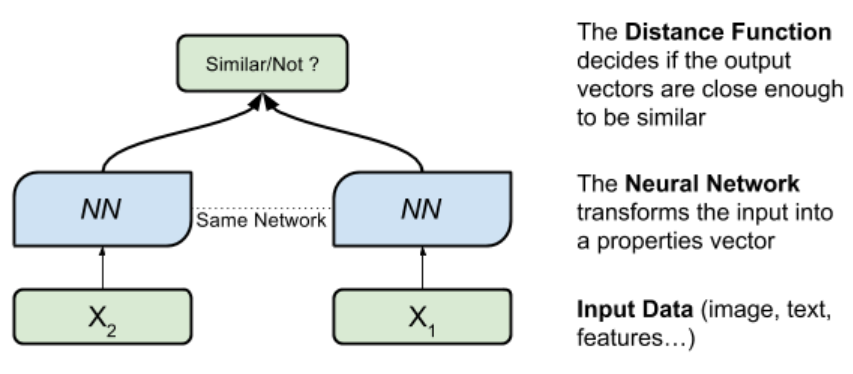
siam特点
- 共享权重
- 做检索,对比相似性。information经过相同网络,在空间中产生表征向量,计算距离代表相似性
- 以pair对形式进入网络,两两组合,相当于增加数据量
Siam历史
-
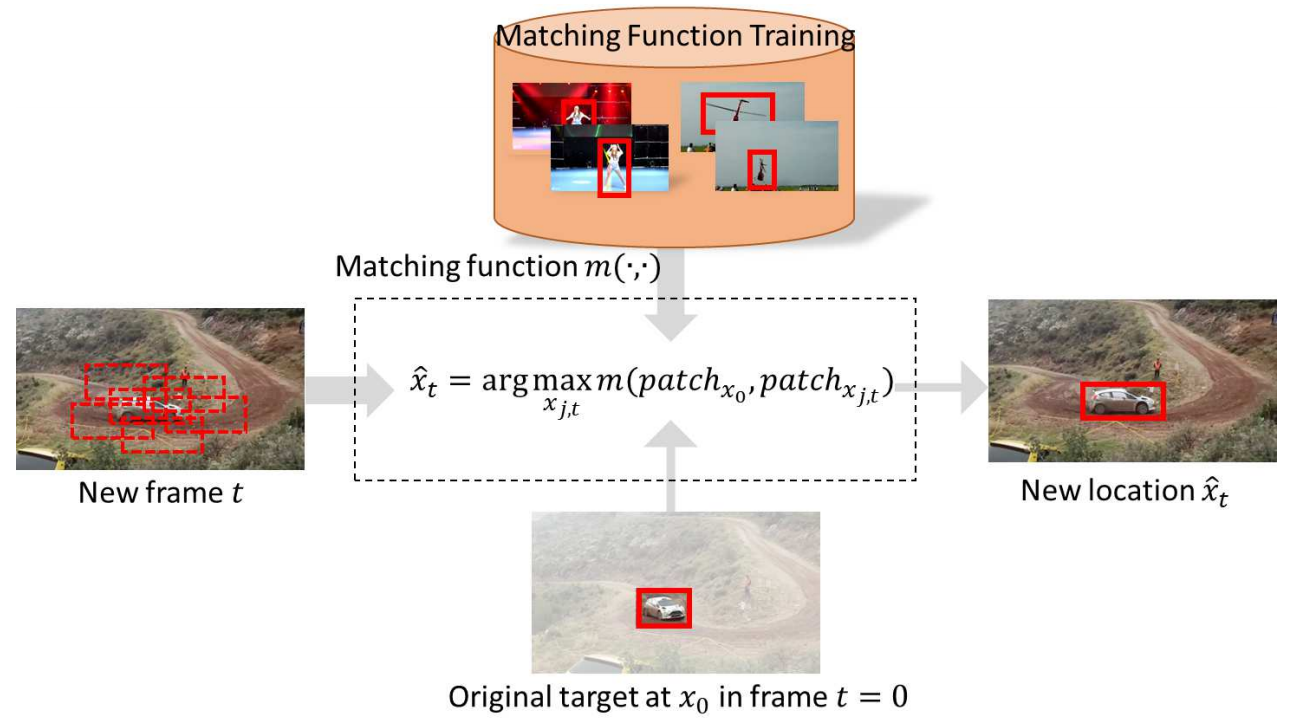
SINT:在图像中抽取很多候选目标,经过同一网络,与模板比较,选择距离最小(最相似)
-
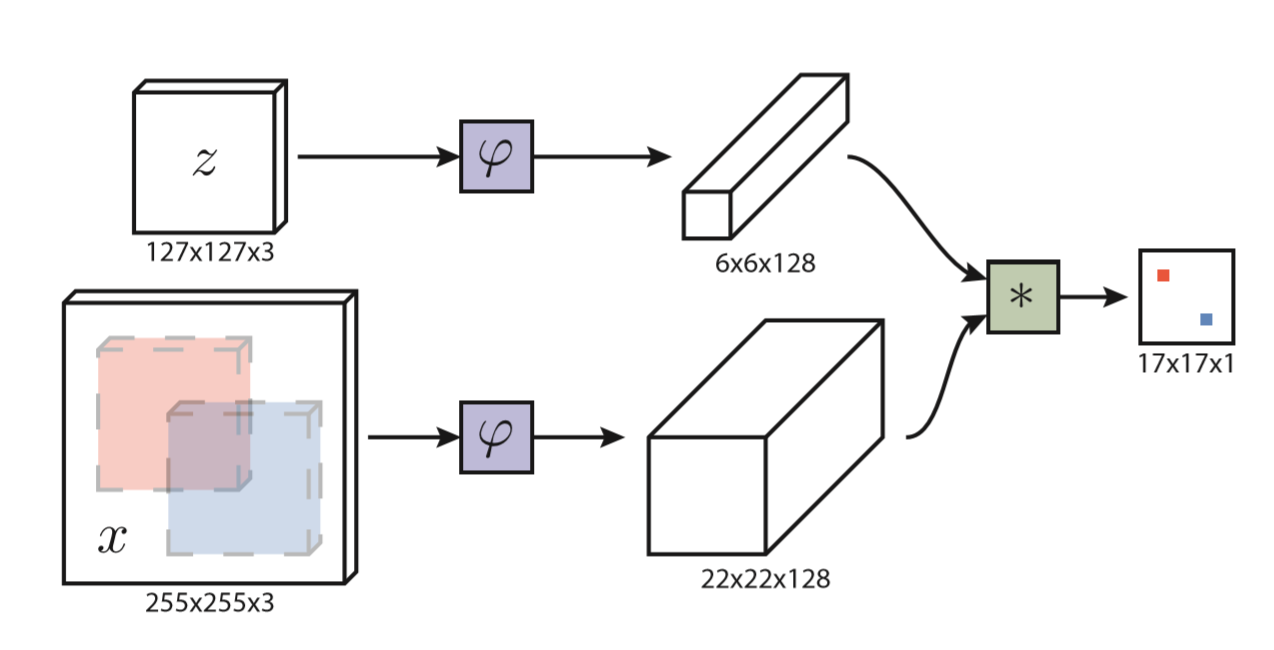
SiamFC:Cross-correlation互相关,与卷积类似,滑窗,计算相似性
-
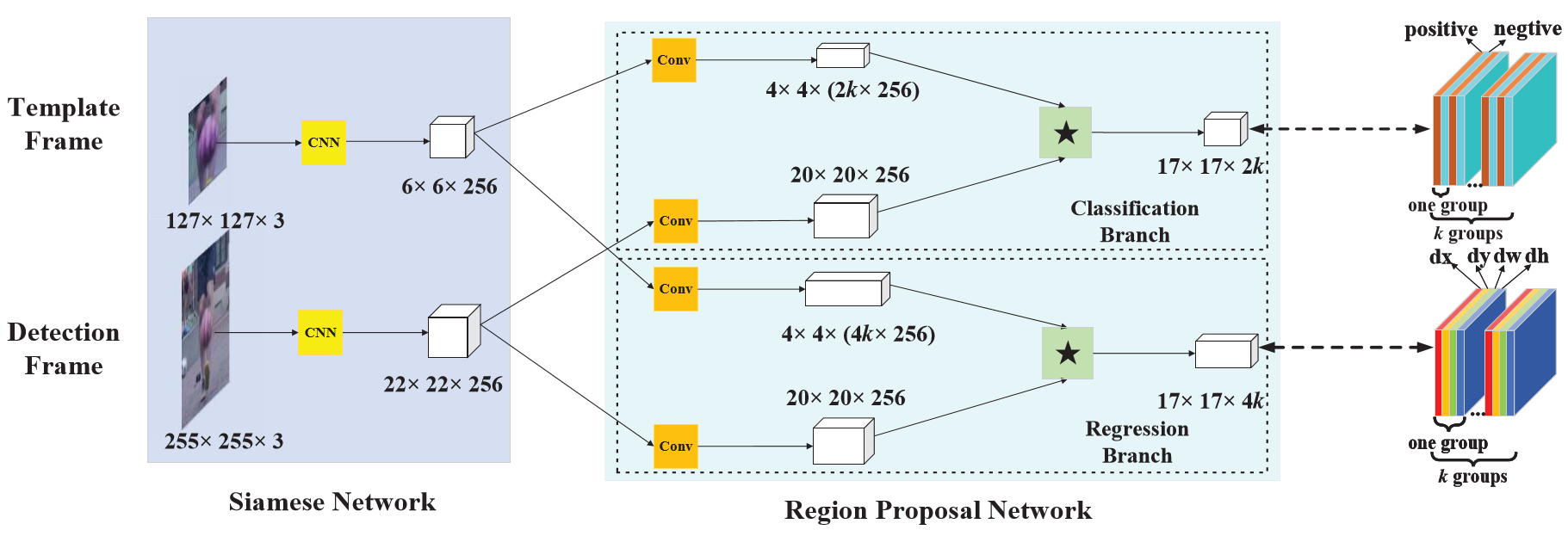
SiamRPN:通过RPN,解决了SiamFC中的僵硬的尺度估计:手动设定几个scale
Motivation
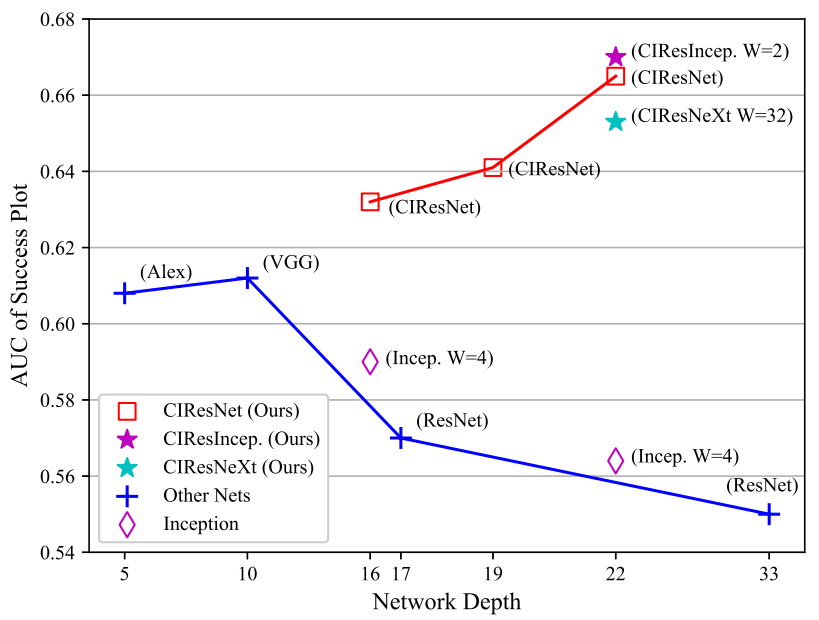
原有backbone很浅,改用深层,performance降低及思考:
- backbone的基本模块:res、inception、卷积
- stride:分类大,精细任务小
- padding:SiamFC中padding全部去掉,而深层backbone的padding是必要的
- 输出尺寸:AlexNet 6×6、而后者为16或32
Analysis & Guidelines
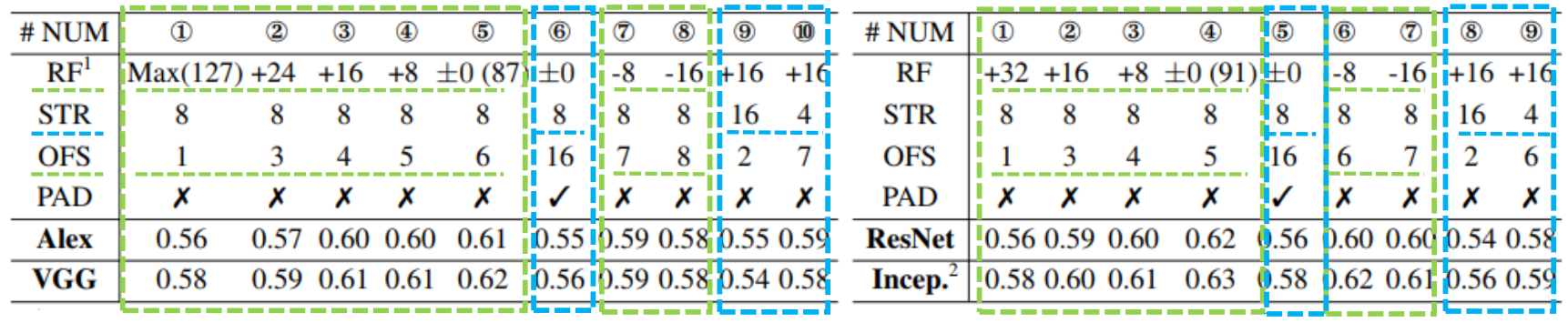
通过修改感受野、步长、输出特征尺寸、padding与否、backbone类型,进行实验,发现padding会降点
padding/PAD
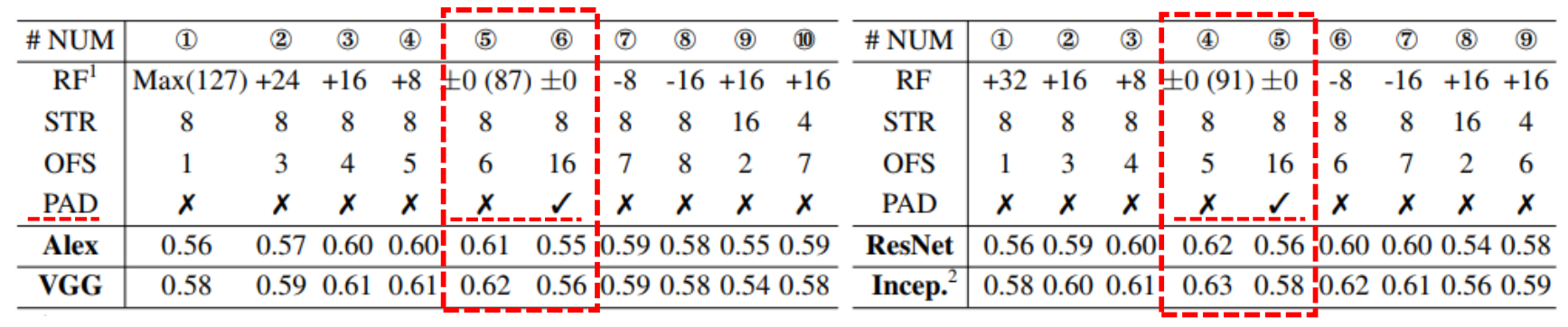
padding导致掉点(但输出尺寸不一致,不能说完全都是padding影响)
-
无padding:
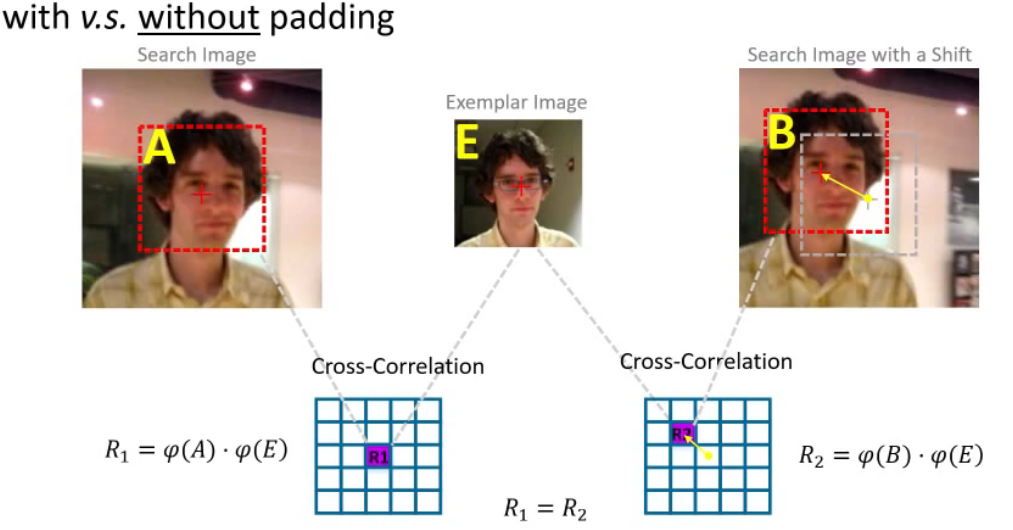
$$
R1=\phi(A)·\phi(E) \
R2=\phi(B)·\phi(E) \
R1 = R2
$$- $E$:模板
- $A B$:目标位置
- $\phi$:backbone,提取特征向量
- $·$:cross-correlation
- $R$:响应
- 因为E相同、A和B是同一目标提取向量所得,相同,故两响应相同,满足平移不变性
-
有padding:
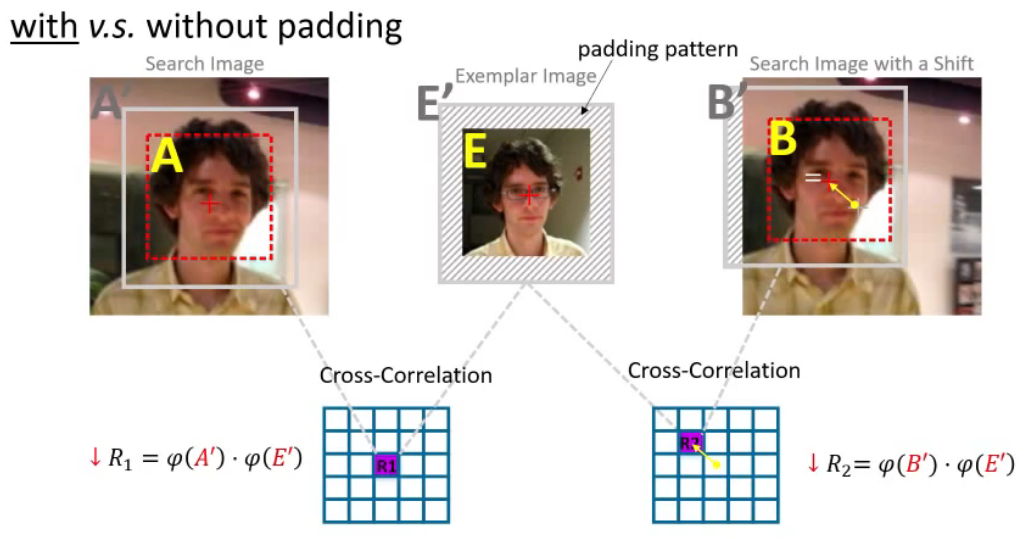
$$
R1=\phi(A’)·\phi(E’) \
R2=\phi(B’)·\phi(E’) \
R1 \not= R2
$$- padding引入外层感受野,目标位置变大,模板变大
- 扩大后的目标仍在画面中时,没有变化
- 扩大后的目标不在画面中时,$\phi(A’)\not=\phi(B’)$,最终导致两响应不同,破坏平移不变性
- 而深层网络中,感受野会快速扩大,很容易就会超出画面
步长STR
跟踪的位移较小,使用小步长捕捉微小变化(siam跟踪通常为8)
感受野RF和输出尺寸OFS
-
二者具有相关性,互影响,所以一起讨论
-
在实验中,performance出现“单峰”,表示RF和OFS大小适中为好
-
后续分析:
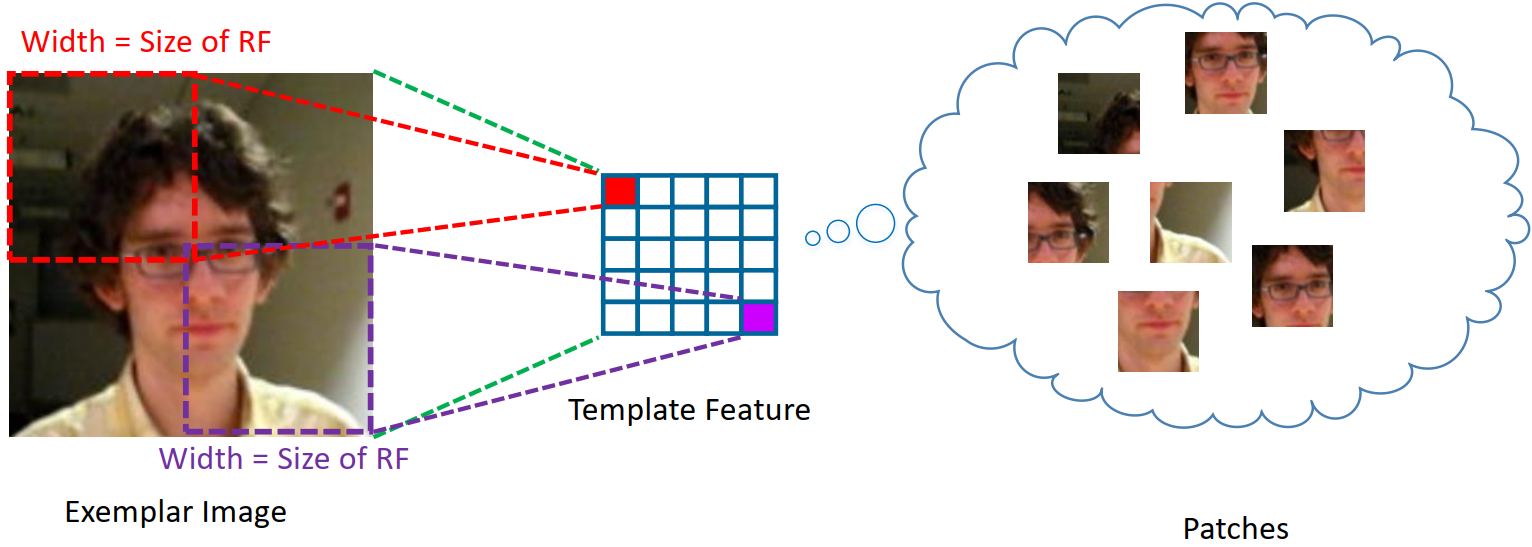
- feature map中的element,所对应的RF太小,表示网络太浅,提取特征能力差;而RF太大,不仅捕捉不到细节,而且element之间的重叠率overlap ratio上升,导致特征信息冗余,也会降低feature的判别
- 故感受野合适大小才行
Guidelines
- 步长:小,4或8,捕捉运动变化(4较慢)
- 感受野:feature与输入的尺寸比在60%~80%
- 步长、感受野、输出尺寸,应作为整体考虑,最终performance是每个环节共同决定。实验中不去掉padding,而通过CIR修改输出尺寸,也能获得不错的效果
Method
根据以上guidelines,设计新的网络
-
1×1卷积:调整维度,减少参数
-
cropping-inside residual unit
-
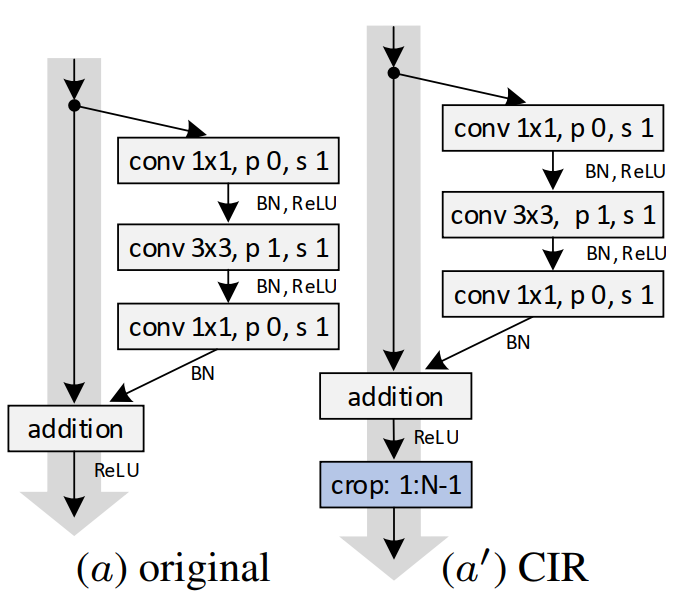
CIR Module:原始残差单元中,两个1×1用于维度调整,3×3卷积,因为padding为1、stride为1,输出feature map中仅最外一圈受padding影响,故本文中移去。此法除了消除padding影响,而且因为减小了feature大小,有提速作用。
-
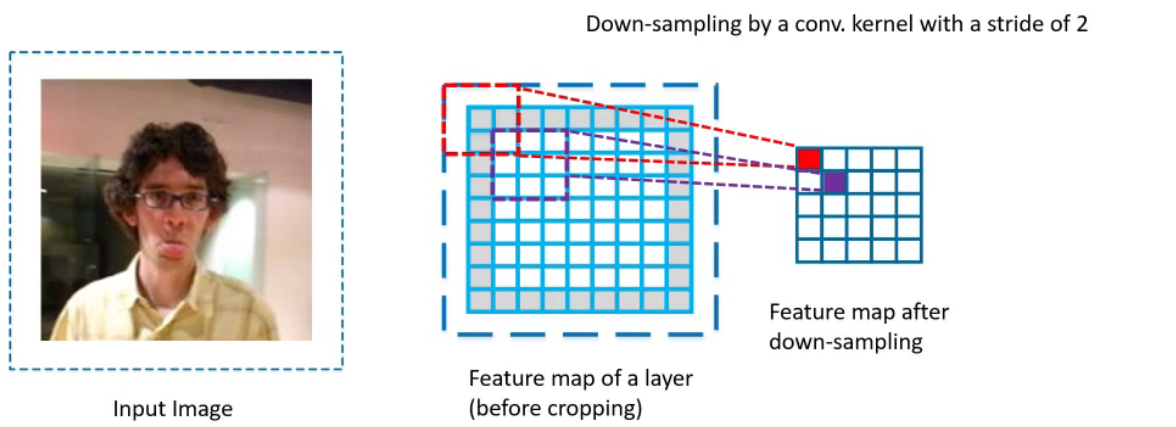
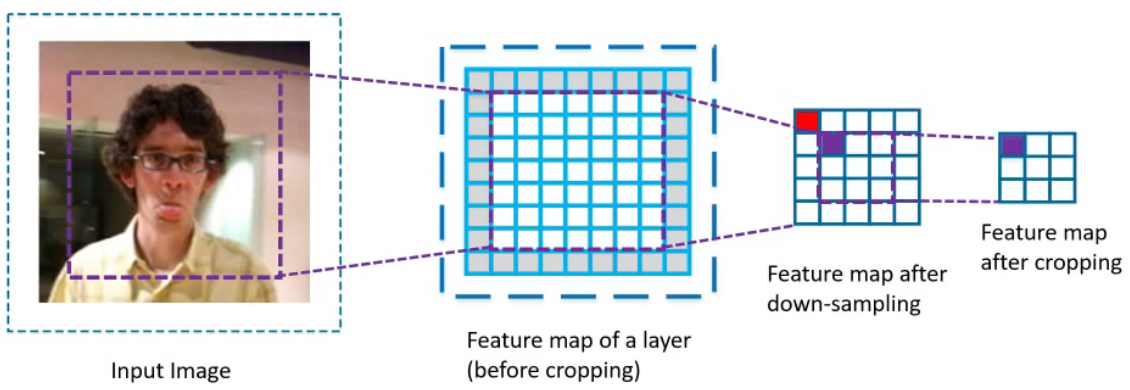
CIR-Downsampling Module:原始残差网络的深层下采样单元,采用conv中增大步长的方式减小feature map大小;本文不同于传统认为的conv+大步长会减轻信息丢失,而是采用了小步长+最大池化的下采样方法。
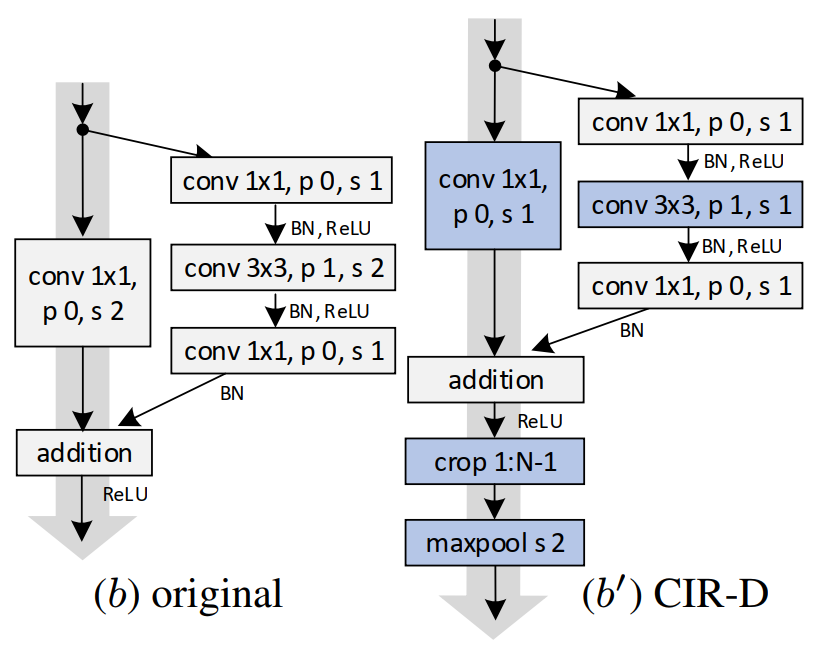
原因:传统方法结合crop消去最外层feature后,剩余feature map的感受野不足以覆盖完整图片。改为stride1后,紫色映射范围向左上移动一位,覆盖完全。
以原本的stride2 conv3的方式下采样:
-
-
构建新网络
通过在不同网络、不同深度下的组合测试(实验中注意不能一味追求深度,要注意输出尺寸)
- 确定步长:3-stage网络步长为8;2-stage网络步长为4
- 堆叠CIR单元:合理控制CIR、CIR-D单元数,确保最终层神经元感受野在原图的60%~80%(并非全部都是CIR单元,具体见论文描述)
- 深度增加,感受野超过合理区间时,减半步长至4
最终确定了深度为22层。
-
加宽channel
作者尝试在ResNet的unit的1、 3、 1卷积中加宽通道数以提升性能,结果过高的通道数造成掉点。作者认为过高的通道对cross-correlation并不友好,最终在256或512为宜。