计算的目的不在于数字本身,而在于洞察其背后的意义。 ——理查德·哈明
向量与基向量
二维空间中,一个向量,例如[3,4],表示$3\hat{x} + 4\hat{y}$,$\hat{x}$表示基向量。即,**一个向量表示对基向量操作的结果。**知道基向量后,通过向量的数字,即可确定向量。 😄
同时,数乘向量、向量加法这两个向量最基本的操作,也可由对基向量数乘、相加去理解。
$$
\begin{align}
\left[
\begin{matrix}
3\
4
\end{matrix}
\right]
&=
3 *
\left[
\begin{matrix}
1\
0
\end{matrix}
\right]
- 4 *
\left[
\begin{matrix}
0\
1
\end{matrix}
\right]
\
&=
\left[
\begin{matrix}
3\
0
\end{matrix}
\right]
\left[
\begin{matrix}
0\
4
\end{matrix}
\right]
\
&=
\left[
\begin{matrix}
3\
4
\end{matrix}
\right]
\end{align}
$$
空间与线性相关
- 由基向量的各种组合,即可得到各种向量,这些向量的集合可以理解为空间
- 二维空间内,任意两个不同方向的向量,均可看做基向量,从而得到空间内的所有向量;一旦两个基向量方向相同/相反,即重叠,则其能组合得到的向量集合,将从一个二维平面降维至一条线,可称两条基向量线性相关;一旦两个基向量是零向量,则退化为一点
- 三维空间中,两条基向量可以确定一个过原点平面,若第三条基向量不在这个平面上,即可平移这个平面得到整个三维空间;但如果基向量3在平面上,则无法组合出新的向量,此时称基向量3与1和2线性相关(可由1和2组合得到)
- 但一般称坐标轴上的单位向量为基向量
线性变换
- 对空间(中所有向量)的变换
- 与函数意义相似,输入向量,进行变换,输出向量
- 线性:任意直线变换后仍为直线,且原点保持固定 或 保持可加性与成比例
- 线性变换后的空间,基向量发生了变化,但是只要知道变化后的基向量,就能完全掌握新的空间。对于二维空间,有两个基向量,这两个向量4个数字,就能确定新的空间,这就引出了矩阵。
矩阵
- 将新的基向量写在一起,即可表示进行的线性变化。下面这个矩阵中,$\hat{x}=[1,3],\hat{y}=[2,4]$,表示进行线性变换后,两个基向量的变换。
$$
\left[
\begin{matrix}
1 & 2\
3 & 4
\end{matrix}
\right]
$$
- 又由于一组基向量即可确定一个空间,所以利用这个矩阵,即可求得线性变换后的向量。
- 如下,乘号左边为线性变换矩阵,右边为原向量,结合矩阵是基向量集合,与向量是对基向量的操作,可以列出下式。
$$
\left[
\begin{matrix}
1 & 2\
3 & 4
\end{matrix}
\right]
*
\left[
\begin{matrix}
2\
-1
\end{matrix}
\right]
2
\left[
\begin{matrix}
1\
3
\end{matrix}
\right]
- -1
\left[
\begin{matrix}
2\
4
\end{matrix}
\right]
=
\left[
\begin{matrix}
0\
2
\end{matrix}
\right]
$$
矩阵乘法与复合线性变换
- 由上可知,矩阵是与线性变换密切相关的。每一个矩阵都可代表一个线性变换。
- 当出现多次(复合)线性变换时,既可以用一个矩阵直接表示最初到最终的变化结果,也可以用两个矩阵表示对原向量先后进行变换。
- 此处有一点需强调,若用两个矩阵先后表示,每个矩阵中的基向量,也应表示为对原始基向量的变换。
- 如何求出复合矩阵?(矩阵乘法如何计算?)我们知道矩阵可理解为一次线性变换;同时矩阵也表示基向量的集合;复合矩阵中是经过两次线性变换后得到的基向量。整合这三个概念,可知:矩阵乘法$ A\times B=C $,可以理解为,对B中每个基向量,进行A的线性变换操作,从而得到C中的每个基向量。
$$
\begin{align}
\left[
\begin{matrix}
1 & 1\
0 & 1
\end{matrix}
\right]
\times
\left[
\begin{matrix}
0 & -1\
1 & 0
\end{matrix}
\right]
&=
\left[
\left[
\begin{matrix}
1 & 1\
0 & 1
\end{matrix}
\right]
\times
\left[
\begin{matrix}
0\
1
\end{matrix}
\right]
\left[
\begin{matrix}
1 & 1\
0 & 1
\end{matrix}
\right]
\times
\left[
\begin{matrix}
-1\
0
\end{matrix}
\right]
\right]
\
&=
\left[
\begin{matrix}
1 & -1\
1 & 0
\end{matrix}
\right]
\end{align}
$$
- 先后顺序:在线性变换的矩阵×向量中,看到矩阵在左,向量在右。这与f(x)类似,映射在x左侧。那么复合矩阵中,也应是第二步线性变换×第一步线性变换×原向量 = 复合矩阵×原向量。这给我们的启示是矩阵乘法中顺序不能随意调换。
行列式
- 在线性变换中,空间有时被拉伸,有时被挤压,有时被翻转,行列式就是来衡量变换程度,即一个区域在变换前后的面积之比。当然,对于基向量框选的区域,原始面积当然为1,此时只需求出变换后的面积即可,这也正是行列式所代表的意义。
$$
det(
\left[
\begin{matrix}
3 & 2\
0 & 2
\end{matrix}
\right]
)
6
$$
- 行列式>0:将一个区域扩大n倍/缩小至$\frac{1}{n}$
- 行列式=0:区域面积变为0,表示空间受到降维,面变为线甚至点。这和线性相关的结果相同,所以,矩阵行列式=0必然推出矩阵列线性相关
- 行列式<0:空间被翻转,绝对值仍表示面积缩放(二维中的自然理解:基向量1向2靠近,空间被压缩,单位面积从1向0靠近;基向量同方向,降维,单位面积为0;基向量1到了2的另一侧,单位面积降至0以下)
逆矩阵
线代可用于求线性方程组的解。对于一个线性方程组(多元一次),可将其改写为$A\vec{x}=\vec{v}$形式。则$\vec{v}$可看作$\vec{x}$由线性变换A得到,$\vec{x}$通过对$\vec{v}$进行相反的线性变换就可求得。
$$
\begin{align}
2x+5y+3z &= -3\
4x+0y+8z &= 0\
1x+3y+0z &= 2\
\downarrow \
\left[
\begin{matrix}
2 & 5 & 3\
4 & 0 & 8\
1 & 3 & 0
\end{matrix}
\right]
\left[
\begin{matrix}
x\
y\
z
\end{matrix}
\right]
&=
\left[
\begin{matrix}
-3\
0\
2
\end{matrix}
\right]
\end{align}
$$
逆矩阵$A{-1}$:相反的线性变换。$A{-1}A\vec{x}=\vec{x}=A^{-1}\vec{v}$
此处需先分析原始线性变换A:是否将空间降维,即$det(A)=0?$
- 未降维:此时可以求得逆矩阵$A^{-1}$。
- 降维:无逆矩阵(无法从底维转高维)。但是解仍然可能存在(如降维至直线,但$\vec{v}$恰好在这条直线上)
列空间、秩、零空间
- 列空间:线性变换后,新的空间由矩阵中的每一列共同决定(新的基向量),所以把新的空间称为列空间
- 秩:列空间的维数($\leq原空间维数$)
- 满秩:秩与原空间维数相同
- 零向量一定在列空间中
- 满秩变换:仅有零向量能落在原来位置
- 非满秩变换:一系列向量会变为零向量
- 零空间:如上的非满秩变换情况中,变换后落在零点的向量的集合,称为零空间或核
- 当线性方程组的$\vec{v}$在列空间中时,方程组有解(?)
- 当线性方程组的$\vec{v}=[0,0]$时,零空间中的向量是方程组的所有可能解
非方阵
以上的讨论都是针对方阵,即在相同维数空间中的变换。非方阵表示在不同维度空间中的映射变换。
- 2×3矩阵:3列表示原空间有3个基向量,是三维空间;2行表示新空间中每个基向量用两个数字即可确定,是二维空间;即将3D映射至2D
$$
\left[
\begin{matrix}
-3 & 2 & 4\
0 & 1 & 5
\end{matrix}
\right]
$$
- 3*2矩阵:2列表示原空间2个基向量,二维;3行表示新空间三维;即2D映射至3D,但仍为一平面(列空间)
$$
\left[
\begin{matrix}
-3 & 2\
0 & 1\
3 & 4
\end{matrix}
\right]
$$
点积
对于$\vec{v}·\vec{w}$,书中定义是一方向另一方投影的长度×另一方向量长度,正负号表示两向量是否同向(广义)。那么点积是如何与投影建立起联系的?
考虑二维降维至一维,且线性变换是二维向量投影至一维的情况:假设$\hat{u}$是列空间的基向量[1],显然对于线性变换矩阵$[a, b]$有以下结论:
$$
a=\hat{x}在直线投影=u_x
\
b=\hat{y}在直线投影=u_y
$$
则变换矩阵为$[u_x, u_y]$,任一向量线性变换后的结果为:
$$
[u_x, u_y]
\left[
\begin{matrix}
v_x \
v_y
\end{matrix}
\right]
[v_x u_x + v_y u_y]
$$
这与点积的计算方法一致:
$$
\left[
\begin{matrix}
u_x \
u_y
\end{matrix}
\right]
·
\left[
\begin{matrix}
v_x \
v_y
\end{matrix}
\right]
[v_x u_x + v_y u_y]
$$
所以可以通过线性变换的角度理解点积,将某一向量看做矩阵进行计算。
叉积
-
结果是一个数(2d)/向量(3d),数值上等于两向量围成的平行四边形面积,方向垂直于此平行四边形(右手定则,食指$\vec{v}$,中指$\vec{w}$,拇指方向)
-
值有正负,$\vec{v}\times\vec{w}$时,$\vec{v}$在$\vec{w}$右侧时值>0,左侧<0
-
因为是代表面积,所以可以采用行列式的角度
-
二维时与线性变换建立联系:二维情况下:输出一个数。原始两个基向量,经线性变换,成为$\vec{v}$和$\vec{w}$,此时变换矩阵就是由$[\vec{v}\ \vec{w}]$组成,矩阵的行列式就是带符号的面积,即叉积的值
-
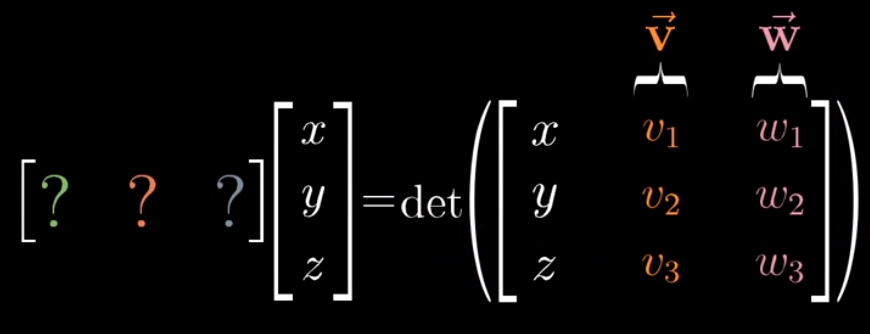
三维情况下建立联系:接收两个向量,输出一个向量,这与直接延续二维时的思路:接收三个向量,组成矩阵求行列式有所不同。
-
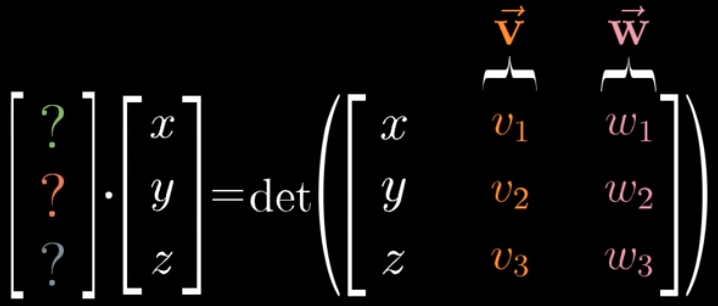
但仍可延续之前想法,建立一个以$\vec{v}$、$\vec{w}$ 为已知量、结合某一未知量[x,y,z]的变换过程:行列式的结果是一个数字,相当于一维,这就建立起三维到一维的变换过程
-
变换矩阵可以变为向量
-
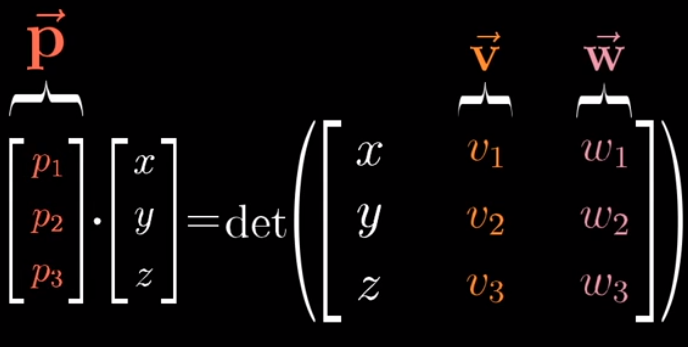
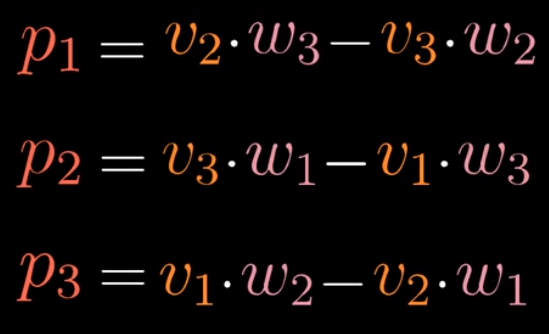
将变换矩阵/向量命名为$\vec{p}$
-
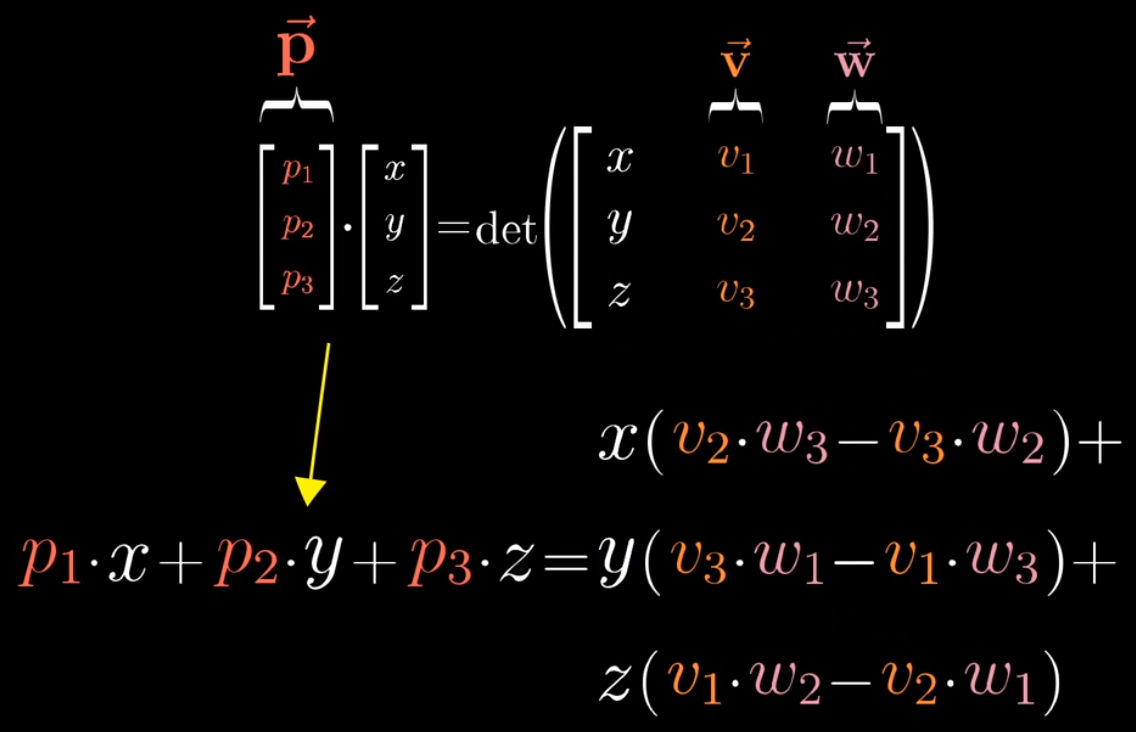
左右拆开,整理,可见$\vec{p}$ 在计算角度来看就是叉积(右为叉积公式)
-
空间角度:上式左侧是点积,即寻找$\vec{p}$ ,与某一向量的点积,等于这一向量与$\vec{v}$ $\vec{w}$ 构成的平行六面体的体积。
- 对于六面体体积,$\vec{v}$ $\vec{w}$ 构成底面,[x,y,z]是其斜边,斜边在垂直于底面方向的投影就是高
- 对于左侧点积,点积部分已经说过点积与投影相关。点积=[x,y,z]在$\vec{p}$ 方向投影长度×$\vec{p}$ 的长度
- 显然,当$\vec{p}$ 是垂直于底面,且长度为底面积时等式成立。这也解释了叉积的含义。
-
基变换
同一个向量,在不同的基向量下,有不同的表示(标量)
-
在每一种基向量的情况下,基向量都是[1, 0] [0, 1],只是坐标轴的方向、单位长度不同。默认的标准基向量时,垂直坐标系,两轴单位长度相同;特殊基向量时,坐标系可能不垂直,两轴单位长度也可能不同,但基向量仍为[1,0] [0,1]
-
两种基向量的关系:(向量数字均假设)
-
特殊基向量标准下的一个向量
$$
特殊基向量矩阵
\left[
\begin{matrix}
1 & 0\
0 & 1
\end{matrix}
\right]
\times
基于特殊基向量的向量(标量)
\left[
\begin{matrix}
3\
5
\end{matrix}
\right]
$$ -
标准基向量标准下的同样一个向量
$$
标准基向量矩阵
\left[
\begin{matrix}
1 & 0\
0 & 1
\end{matrix}
\right]
\times
基于标准基向量的向量(标量)
\left[
\begin{matrix}
2\
6
\end{matrix}
\right]
$$ -
即,对于同一个向量,特殊标准下,要3个基向量1,5个基向量2;而默认标准下,要2个基向量1,6个基向量2
-
此时虽然二者表示的是同一个向量,但因为各自使用不同标准,不能直接划等号;**若要划等号,需要将其中一个的基向量矩阵变换,使用对方的标准来描述自己的基向量(基变换矩阵)。**假设特殊标准中的两个基向量,由默认标准描述是如下,则可划等号
$$
特殊基向量矩阵
\left[
\begin{matrix}
1 & 0\
0 & 1
\end{matrix}
\right]
\rightarrow
由默认基向量描述是
\left[
\begin{matrix}
2 & 1\
1 & 2
\end{matrix}
\right]
$$$$
\left[
\begin{matrix}
2 & 1\
1 & 2
\end{matrix}
\right]
\times
\left[
\begin{matrix}
3\
5
\end{matrix}
\right]
=
\left[
\begin{matrix}
1 & 0\
0 & 1
\end{matrix}
\right]
\times
\left[
\begin{matrix}
2\
6
\end{matrix}
\right]
=
\left[
\begin{matrix}
2\
6
\end{matrix}
\right]
$$
-
此时的特殊矩阵仅是改变了描述方法,但实际上的基向量并未改变
-
特殊基向量向常规基向量变换:即以上式21、式22
-
常规基向量向特殊基向量变换:按照如上思路,只要把常规矩阵用特殊标准描述即可,或求逆矩阵
-
常规标准下的线性变换:变换矩阵×向量
-
特殊标准下的线性变换:基变换逆矩阵×变换矩阵×基变换矩阵×向量,表示先将特殊标准的向量转化为常规标准,然后进行线性变换,最后再把基换回去
-
$A^{-1}MA$:转移作用
特征值、特征向量
上文的基变换着眼于视角的变化,这与特征基关系密切
-
在线性变换前后,大部分向量都偏离了原来的直线,仅有一些特殊的直线上的向量,在变换后,仍在此直线上,只是向量长度受到拉伸或压缩,并且一条直线上的所有向量的伸缩程度相同。这些特殊直线上的向量,称为特征向量;一条直线上的伸缩因子,称为特征值。
-
特征值<0:变换使得向量反向,但仍在原直线上即可
-
应用:
- 三维空间的旋转,可以看做绕特征向量的旋转,几何角度更直观
- 得益于特征值和特征向量,线性变换能够减少对坐标系的依赖,更多地依靠特征来描述
-
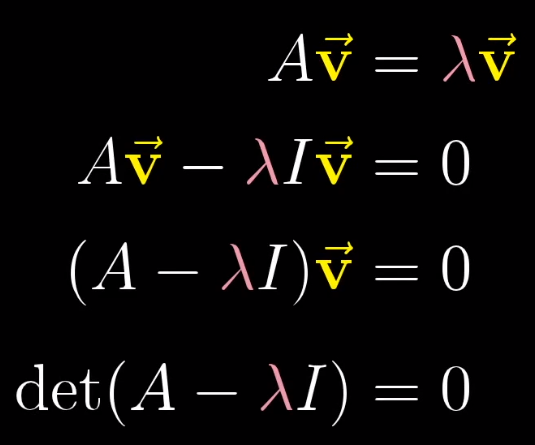
计算:
- $A$:变换矩阵
- $\vec{v}$:特征向量
- $\lambda$:特征值
-
特征基:基向量也是特征向量,这表示在此线性变换中,只是在坐标的两轴方向进行了拉伸,变换矩阵必然是对角矩阵。
-
应用:矩阵连乘。当一个线性变换有多个特征向量,且其能够组合出整个空间时(特征向量可以作为新的基向量),将原变换换基$A^{-1}MA$ ,新的变换矩阵是对角矩阵,可快速进行连乘(对角的高次幂),再将结果换基回来$AMA^{-1}$